Scout
I fly thermal-drone search missions myself — 100+ since 2024 — and coordinate 70 volunteers across a regional fawn rescue network in Bavaria. In three seasons we’ve flown 424 missions, scanned 3,744 hectares, and found 240 fawns. The first two seasons ran on WhatsApp groups and spreadsheets; I built Scout to replace that coordination chaos. I wrote more about the operational problems in this blog post.
Scout went live for the 2026 season — 145 missions, 1,000 hectares, and 76 fawns so far, coordinated through the app.

The Domain
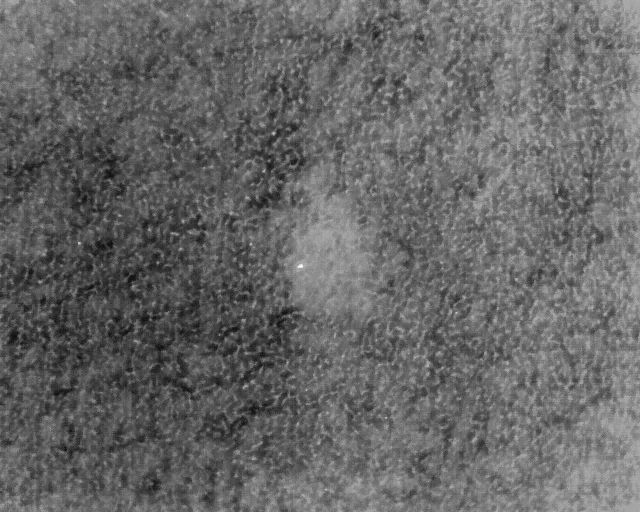
Every spring across Germany, tens of thousands of fawns are killed or maimed by mowing machines. Their survival instinct is to freeze and hide in tall grass — the exact behavior that makes them invisible to a farmer on a tractor. Volunteer drone pilots with thermal cameras can spot them before mowing — but only in a narrow window around dawn, before the sun warms the ground and washes out the thermal contrast. After that the image degrades fast: every molehill and every dandelion starts reading as a potential fawn, and the false-positive rate climbs until flying is pointless.
The window shrinks as the season goes on — earlier sunrises, warmer mornings — exactly while demand peaks with the second and third cuts. And the inputs are messy: a typical request arrives at 9 PM the evening before. A farmer wants to mow tomorrow, five fields, no coordinates — “the meadow behind the inn, left along the dirt road.” Before anyone is allowed to fly, the hunting leaseholder has to be reached and asked for permission. Coordinating dozens of fields, pilots, ground crew, and farmers inside that window, across an entire region, is the real bottleneck — not the technology.
Decisions That Shaped the Product
Offline-first was non-negotiable. Missions happen in rural areas at dawn. Coverage is thin and comms degrade mid-mission. Every critical workflow — accepting a mission, logging a find, marking a field clear — works offline and syncs when connectivity returns. Nothing blocks on the network.
Minimal UI for 4 AM brains. No one wants to navigate a complex interface before sunrise. The ground crew’s companion app is just a map with pins to walk to.
Zero-friction onboarding. Volunteers rotate constantly — a first-time helper at 4 AM shouldn’t need to create an account before they can help. Ground crew scan a QR code to join a mission and see the live drone position immediately. They can create an account later if they stick around, but the barrier to showing up and being useful is zero.
Built around the real workflow. The evening before: a farmer submits a field scan request. The system matches available pilots. At dawn, pilots scan with thermal drones and drop pins. Ground crew walks to pins, secures fawns. Farmer gets the all-clear. Every screen maps to a real moment in this process.
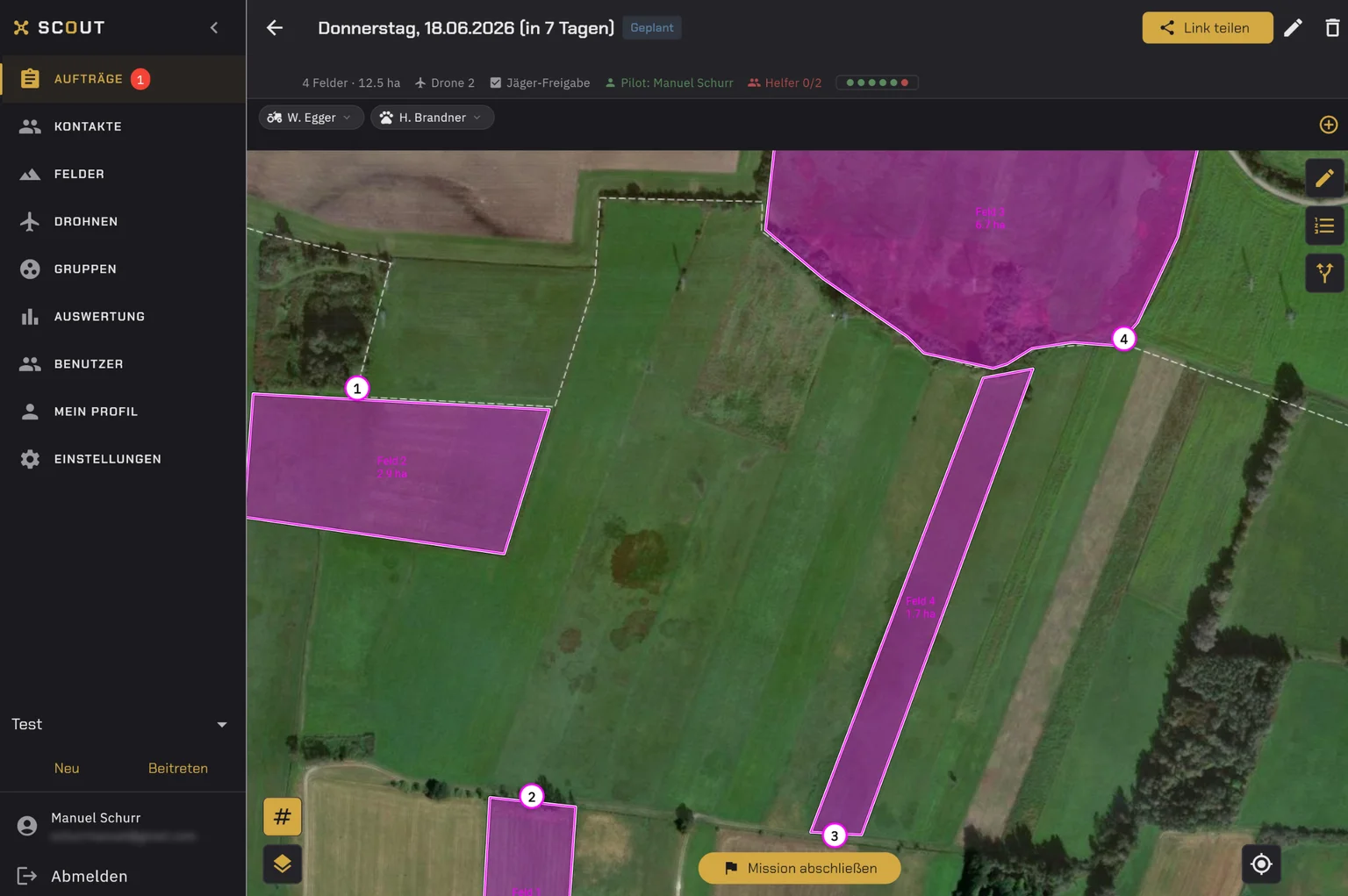
One live picture of the region. The coordinator works from a common operating picture: every field and mission in its current state — requested, assigned, in progress, cleared — plus finds as they’re logged. In 2025 that picture had to be reconstructed from WhatsApp threads and spreadsheets after the fact; now pilots, ground crew, and coordinators work from the same live map.
Why This Problem Is Interesting
The part I keep coming back to is the loop at the center of every mission. The pilot spots a heat signature and drops a pin on the drone’s remote; the pin syncs to the helpers’ phones; someone walks to it and carries a fawn out. Detection to action takes seconds when the fawn is close, five to ten minutes when it’s 500 meters out — the loop is bounded by the walk, not by the comms. That is exactly the property the software has to protect at 4 AM on a meadow with one bar of signal.

Nothing in the stack is special-purpose. The drones are off-the-shelf DJI thermal models, the ground crew brings their own phones, and the coordination layer is Scout. That is enough to carry an operation of eight drones across four zones and around seventy volunteers — all of it hardware anyone can buy and software one person can write.
Little of this is specific to fawns. Distributed sensors, a shared live picture, teams that have to act inside a closing window, on networks you can’t trust — the same shape shows up wherever those constraints meet. Fawn rescue is just the version where I’m the operator.
Find Out More
Visit the landing page at c200v.com/scout for more details on Scout’s features and the product itself.